I’ve spent some time playing around the idea of using stepper or brushless motors as rotary encoders.
Stepper acts as a high impedance AC voltage source outputing sinusoidal waveform, it’s just a matter of apmlifying and converting this signal to a square wave:
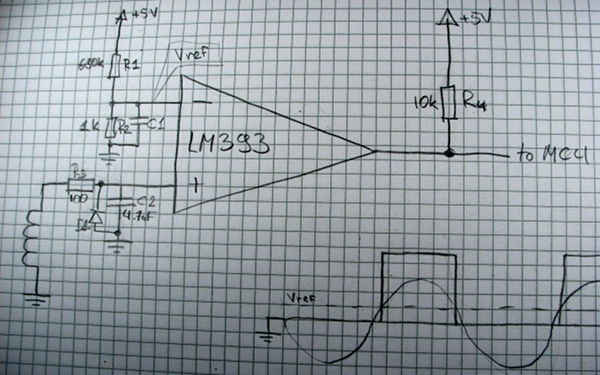
R1 and R2 set up a reference voltage, R3 and C2 low-pass filter the signal from a motor - when this signal goes above the reference voltage, comparator changes it’s output producing a nice square wave.
The same effect can be obtained using a high gain noninverting op amp circuit, but as opamps are not really ment to be operated in saturation regions, I’ve decided to go with a comparator.
You have to do this to two phases of a stepper motor - one phase will lag the other - this way you can determine a direction of rotation.
Here is a piece of arduinized avr code that reads the encoder and drives a single digit 7 segment display:
void setup() {
DDRD = 0xFF;//setup port D as ouput for 7-seg display
pinMode(8, INPUT);//motor phase 1 on PORTC 0
pinMode(9, INPUT);//motor phase 2 on PORTC 1
}
byte digits[] = {
0b00000011,//0
0b11110011,//1
0b10000101,//2
0b00001101,//3
0b00111001,//4
0b01001001,//5
0b01000001,//6
0b00011111,//7
0b00000001,//8
0b00001001,//9
};
byte t = 0; //step counter
byte lastVal = 0; //last value of motor phase inputs
byte b = 1; //segment which is displayed
byte digit = 0; //digit that is displayed
void loop() {
//flash one segment every loop
PORTD = digits[digit] | ~(0x01 << b);
b++;
if(b > 7) {
b = 1;
}
//read status of motor pins
byte val = PINB & 0x03;
if(val != lastVal) {
if((val == 3 && lastVal == 2) ) {
//t is just a step counter, we change the digit every 3 steps
t++;
if(4 == t) {
t = 0;
digit++;
if(10 == digit) {
digit = 0;
}
}
} else if ((val == 2 && lastVal == 3) ) {
if(0 == t) {
t = 4;
if(0 == digit) {
digit = 10;
}
digit --;
}
t--;
}
lastVal = val;
}
}